Your basket is currently empty!

Muino Smart Water Meter Reader
The Muino water approach for water usage sensors aims to simplify installation by reducing complexity. Unlike traditional inductive sensors, the new design is smaller and easier to place, with a more intuitive interface. It also offers higher resolution, allowing for more accurate measurement of water usage, including smaller amounts.
The algorithm has reached a robust state with an automatic calibration feature, eliminating the need for manual calibration. When devices are restarted or newly deployed, the algorithm can now automatically determine the appropriate maximum and minimum values required for autocorrelation. Although this may appear straightforward, it’s important to note that the algorithm handles non-periodic signals that are not continuously active. This means that the precise moment when the first liter of water is measured remains uncertain, whether it occurs after a few seconds or several hours from the start. Additionally, the minimum and maximum values of the sensor cannot be predetermined.
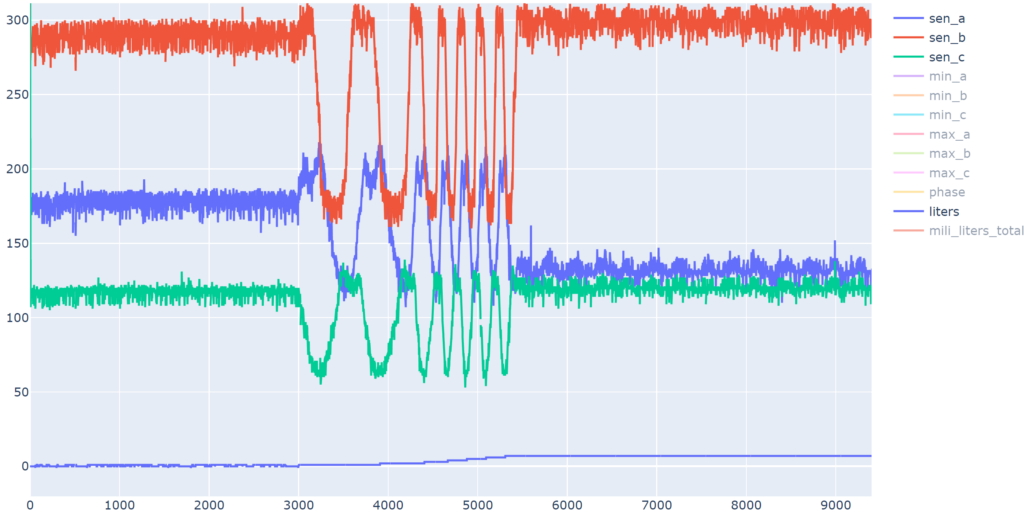
The provided figure illustrates three different signals, each with its own offset and distinct maximum and minimum values. The horizontal line at zero represents the volume of liters. In the absence of any detected liters, the autocorrelation becomes susceptible to noise interference in the signal. To ensure stability, certain algorithm adjustments have been implemented.
- At approximately timestep 3000 on the x-axis, the water flow initiated, resulting in a sinusoidal wave movement. Each complete period of the sinusoidal wave corresponds to the consumption of 1 liter of water.
- Following timestep 5000, there is an increase in the frequency of the sinusoidal wave movement, leading from a higher volume of water consumed.
- Around timestep 5500, the water usage comes to a halt, causing the sinusoidal movement to end and the signal to remain constant.
- Upon opening the water valve, a sinusoidal pattern emerges, and the measurements continue to accurately track its progression.
by
Tags:
Leave a Reply